* Question
What are the operating modes of the PeliCAN controller?
* Answer
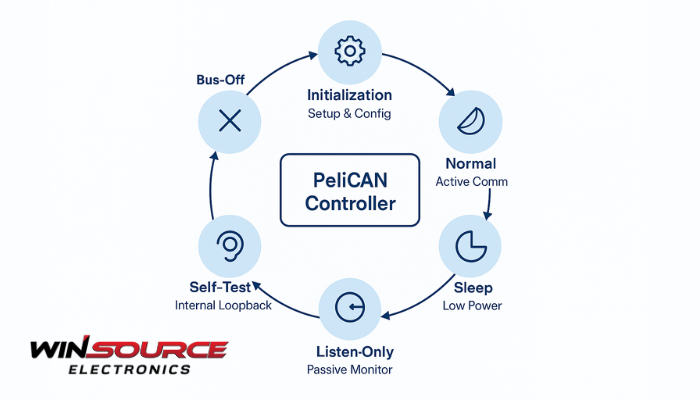
The PeliCAN controller — a widely used implementation of the CAN (Controller Area Network) protocol — provides several operating modes that allow flexible control, testing, and fault management within CAN-based communication systems. These modes determine how the controller transmits, receives, and processes data frames on the CAN bus, ensuring both functional performance and diagnostic capability.
1. Normal Mode
This is the standard operating mode for regular CAN communication.
In Normal Mode, the controller can both transmit and receive CAN messages according to the protocol rules.
- All error detection, acknowledgment, and retransmission mechanisms are active.
- Nodes participate fully in bus arbitration and data exchange.
This mode is used during normal system operation in vehicles, industrial controllers, and embedded networks.
2. Sleep Mode
The Sleep Mode is designed to minimize power consumption when no bus activity is detected.
- The CAN controller stops internal activities and waits for a wake-up signal(from the CAN bus or host processor).
- Upon wake-up, it transitions back to Normal Modefor communication.
This mode is essential in automotive applications where ECUs must conserve battery power during idle conditions.
3. Initialization Mode
Initialization Mode is used for controller configuration before active communication begins.
- In this state, software can set up bit timing, acceptance filters, interrupt configurations, and other control parameters.
- Message transmission and reception are disabled to prevent bus interference during setup.
Once configuration is complete, the controller switches to Normal Mode.
4. Listen-Only Mode
This mode allows the controller to monitor all CAN bus traffic without participating in communication.
- It does not send acknowledgments (ACKs) or error frames.
- Useful for bus analysis, network diagnostics, or passive monitoring
Listen-Only Mode ensures non-intrusive observation of the network, ideal for debugging or validation.
5. Self-Test Mode (Loopback Mode)
In Self-Test Mode, also known as Loopback Mode, the controller internally routes transmitted messages back to its receive buffer without sending them onto the bus.
- Enables verification of CAN functionality without physical bus connections.
- Useful for firmware testing, software validation, and controller diagnostics.
This isolated environment ensures system reliability before deployment.
6. Bus-Off Mode
When the controller experiences persistent transmission errors, it automatically enters Bus-Off Mode to prevent network disruption.
- The node stops transmitting and disconnects from the bus.
- Recovery requires software intervention or automatic reinitialization after a predefined idle period.
This protective mechanism maintains overall network stability and data integrity.
Summary
Mode | Purpose | Key Features |
Normal Mode | Regular CAN communication | Full transmit/receive with error handling |
Sleep Mode | Power saving | Waits for wake-up signal |
Initialization Mode | Configuration setup | No active communication |
Listen-Only Mode | Passive monitoring | Non-intrusive observation |
Self-Test (Loopback) | Functional testing | Internal message routing |
Bus-Off Mode | Fault protection | Disconnects after severe errors |
In summary, the PeliCAN controller supports multiple operating modes that balance performance, safety, and flexibility. From low-power standby to diagnostic and test configurations, these modes enable engineers to manage CAN communication effectively across diverse automotive and industrial environments.
COMMENTS