* Question
Sensor information fusion classification
* Answer
Sensor Information Fusion refers to the comprehensive processing of data from multiple sensors
to obtain more accurate, reliable, and useful information. Sensor fusion can be classified in
different ways based on the fusion levels, processing methods, and application fields. Here are
some common classifications:
1. Classification Based on Processing Levels
1. Data-Level Fusion
– Concept: Combines raw data from multiple sensors directly, often using statistical methods
or signal processing techniques.
– Application: Used for low-level signal processing, such as image registration, point cloud data
fusion, etc.
2. Feature-Level Fusion
– Concept: Extracts features from multiple sensor data and then performs a comprehensive
analysis to obtain fusion results.
– Application: Commonly used in machine learning and pattern recognition fields, such as
speech recognition, image feature matching, etc.
3. Decision-Level Fusion
– Concept: Each sensor independently analyzes the data and makes partial decisions, which
are then combined to produce a final decision.
– Application: Suitable for systems requiring distributed decisions or multi-source information
confirmation, like fault diagnosis, multi-sensor environment monitoring, etc.
2. Classification Based on Fusion Methods
1. Probabilistic and Statistical Methods
– Concept: Utilizes probability theory and statistical methods to combine sensor data.
Common methods include Bayesian estimation, Kalman filtering, and Markov chains.
– Application: Used for multi-sensor tracking, navigation, and positioning.
2. Evidence Theory Methods
– Concept: Based on evidence theory (such as Dempster-Shafer theory) to handle uncertainty
and ambiguity.
– Application: Widely used in fault diagnosis and target recognition.
3. Neural Networks and Deep Learning Methods
– Concept: Employs neural networks and deep learning models to fuse sensor data and
perform pattern recognition, extracting more complex features and relationships.
– Application: Used in computer vision, autonomous driving, speech processing, etc.
4. Rule-Based and Logical Reasoning Methods
– Concept: Uses predefined rules and logical relationships to reason and fuse sensor
information.
– Application: Suitable for expert systems, intelligent monitoring, and other scenarios.
3. Classification Based on Time
1. Instantaneous Fusion
– Concept: Combines sensor data obtained at the same moment in time.
– Application: Suitable for static scene object recognition and state estimation, such as
obstacle detection in UAVs.
2. Time-Series Fusion
– Concept: Combines data over multiple time points to obtain dynamic information.
– Application: Used in dynamic systems like mobile robots and vehicle trajectory tracking.
4. Classification Based on Sensor Type
1. Homogeneous Sensor Fusion
– Concept: Combines data from the same type of sensors (e.g., multiple cameras or multiple
temperature sensors).
– Application: Suitable for improving measurement accuracy and reducing sensor noise.
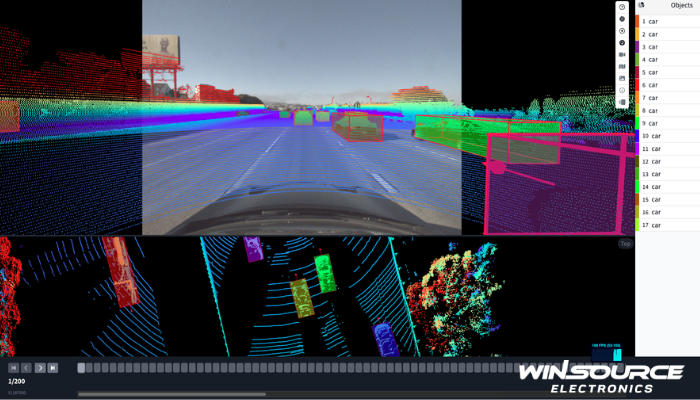
2. Heterogeneous Sensor Fusion
– Concept: Combines data from different types of sensors (e.g., camera and LiDAR, or IMU and
GPS).
– Application: Widely used in autonomous driving, environmental perception, and other fields.
5. Classification Based on Spatial Distribution
1. Centralized Fusion
– Concept: All sensor data is sent to a central processing unit for comprehensive analysis.
– Advantages: Provides a global fusion result but can have higher communication and
processing overhead.
2. Distributed Fusion
– Concept: Each sensor independently processes and preliminarily analyzes its data, and then
the results are sent to a fusion node for the final fusion.
– Advantages: Reduces communication and processing pressure, improving the robustness of
the system.
These classification methods help to understand sensor information fusion in different
application scenarios and aid in designing appropriate fusion strategies. Each type of
classification caters to different fusion goals, data sources, and processing methods.
COMMENTS