* Question
What Are the Two Basic Forms of Data Distribution for an ECU on the CAN Bus?
* Answer
On a CAN (Controller Area Network) bus, an Electronic Control Unit (ECU) distributes data using two basic forms:
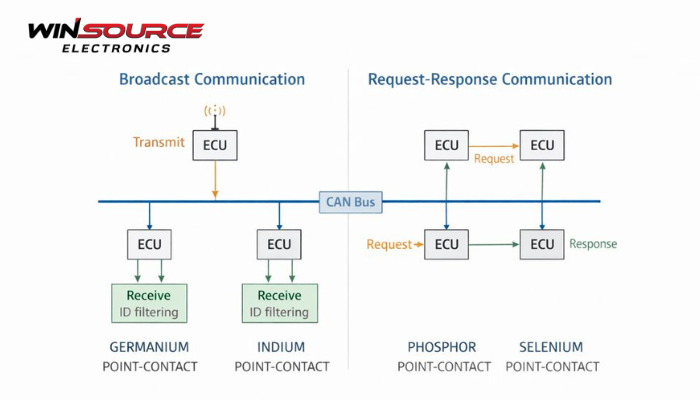
- Broadcast (Producer–Consumer) Communication
- Request–Response (Polling) Communication
These two methods define how data is sent, who receives it, and when it is transmitted.
1. Broadcast (Producer–Consumer) Communication
How It Works
In broadcast communication:
- One ECU producesa data message
- The message is broadcast to all nodeson the CAN bus
- Any ECU that needs the data accepts and uses it
The sending ECU does not need to know who receives the data.
Key Characteristics
- Message-based, not address-based
- One message can be used by multiple ECUs
- Data is identified by message ID, not destination
Typical Examples
- Engine speed
- Vehicle speed
- Temperature or sensor values
These signals are often sent periodically so that multiple ECUs (ABS, dashboard, transmission, etc.) can use the same data.
Why It Is Used
- Efficient use of the bus
- Easy system expansion
- High reliability and real-time performance
This is the most common and preferred data distribution method on CAN.
2. Request–Response (Polling) Communication
How It Works
In request–response communication:
- One ECU sends a request message
- A specific ECU responds with the requested data
- Communication occurs only when requested
This creates a logical “question-and-answer” exchange.
Key Characteristics
- Communication is initiated by the requester
- Usually involves two ECUs
- Data is transmitted only when needed
Typical Examples
- Diagnostic data
- Configuration or parameter reading
- Status queries
This method is widely used in diagnostic and service communication.
Why It Is Used
- Reduces unnecessary data traffic
- Suitable for non-real-time or on-demand data
- Clear communication control
Engineering Insight
These two data distribution forms often coexist in the same CAN system:
- Broadcast communicationis used for real-time operational data
- Request–response communicationis used for diagnostics, setup, and maintenance
Using both methods allows CAN systems to balance efficiency, flexibility, and scalability.
Conclusion
The two basic forms of data distribution for an ECU on the CAN bus are:
- Broadcast (Producer–Consumer) communication, where data is sent to all nodes and used by any ECU that needs it
- Request–Response (Polling) communication, where data is exchanged only when explicitly requested
Together, these two methods form the foundation of reliable and flexible data exchange in CAN-based electronic control systems.
COMMENTS