* Question
Which four different information frames does CAN define?
* Answer
The CAN (Controller Area Network) protocol defines four types of frames to facilitate communication between nodes. Each frame serves a specific purpose in the CAN network. Here are the four different information frames defined by CAN:
1. Data Frame
– Purpose: To transmit data from one node to another in the network.
– Details:
– Contains actual data payload (up to 8 bytes in Classical CAN or up to 64 bytes in CAN FD).
– Includes fields such as the identifier, control bits, data length, and a CRC for error detection.
2. Remote Frame
– Purpose: To request data from another node without transmitting data itself.
– Details:
– Similar to the Data Frame but with no data field (data length is specified as 0).
– Contains the identifier of the requested data frame.
– Typically used in applications where one node queries another for specific information.
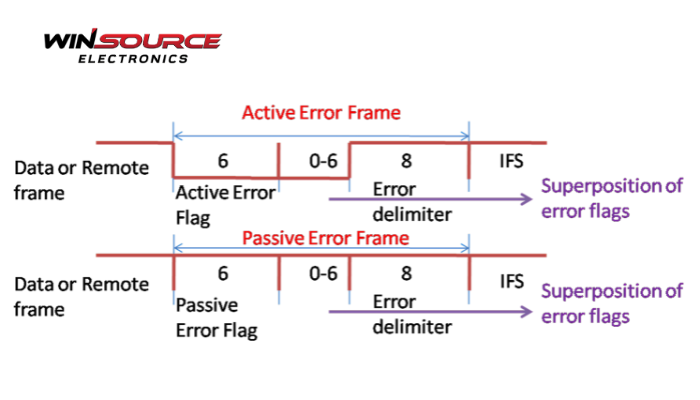
3. Error Frame
– Purpose: To signal errors detected on the network by any node.
– Details:
– Triggered when a node detects a communication error (e.g., CRC mismatch or bit stuffing error).
– Contains error flags and other error-specific information.
– Helps maintain network integrity by notifying all nodes of an issue.
4. Overload Frame
– Purpose: To provide additional time for a node to process data or handle internal conditions.
– Details:
– Generated when a node is overwhelmed and cannot process the next frame immediately.
– Contains overload flags and is sent during inter-frame spaces.
– Rarely used in modern systems as most controllers handle data efficiently.
These frame types ensure that the CAN protocol supports robust communication, including data transfer, error handling, and network synchronization.
COMMENTS